
This post demonstrates how we trained a U-Net (with a ResNet-50 encoder pretrained on ImageNet) to extract building footprints from high-resolution NAIP imagery using OpenStreetMap polygons as labels.
Data
- Input imagery: NAIP 1 m RGB tiles over Orange County, CA
- Labels: Rasterized building footprints from OpenStreetMap
Model & Training
- Architecture: U-Net with a ResNet-50 encoder, skip-connections, and sigmoid output for binary masks
- Loss: Dice loss to handle class imbalance
- Optimizer: Adam (lr = 1e-4) with CosineAnnealingWarmRestarts
- Augmentations: Random flips, 90° rotations, affine jitter
- Training: 20 epochs on 512×512 patches (10 initial + 10 resumed)
Convergence Curves
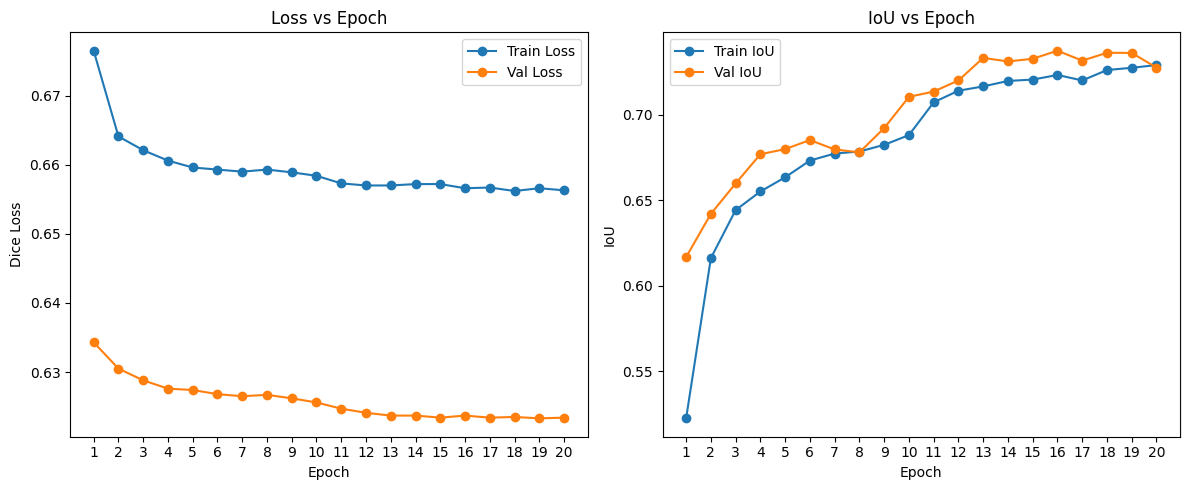
- Left: Dice loss decreases on both training (blue) and validation (orange).
- Right: Intersection-over-Union rises from ~0.52 up to ~0.74 over 20 epochs.
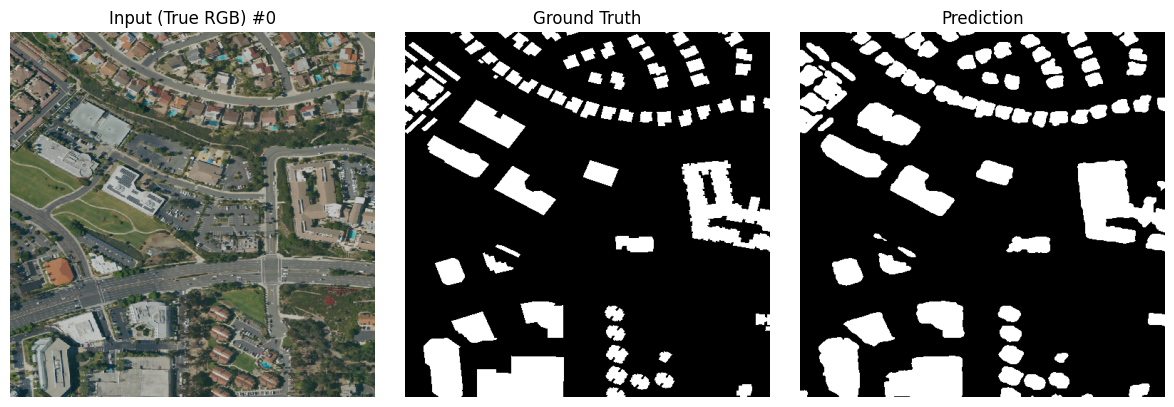
Sample Predictions
Sample 1
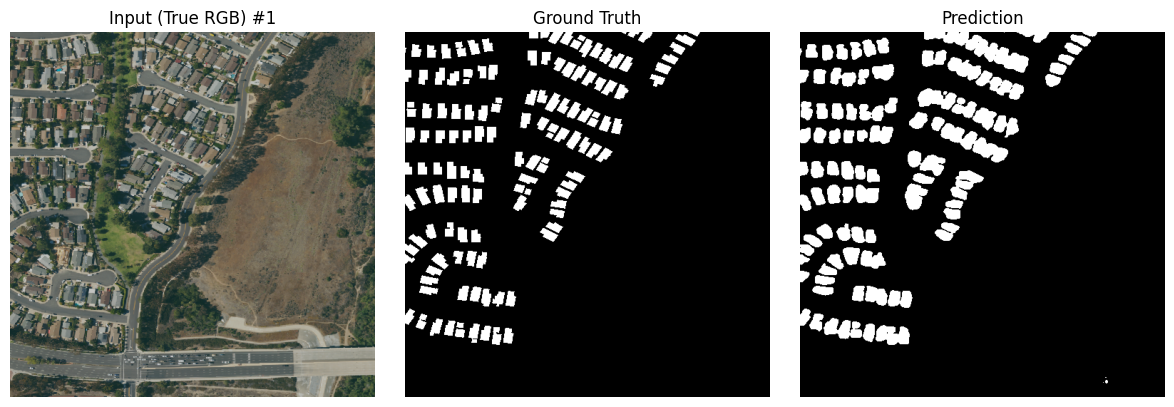
Sample 2
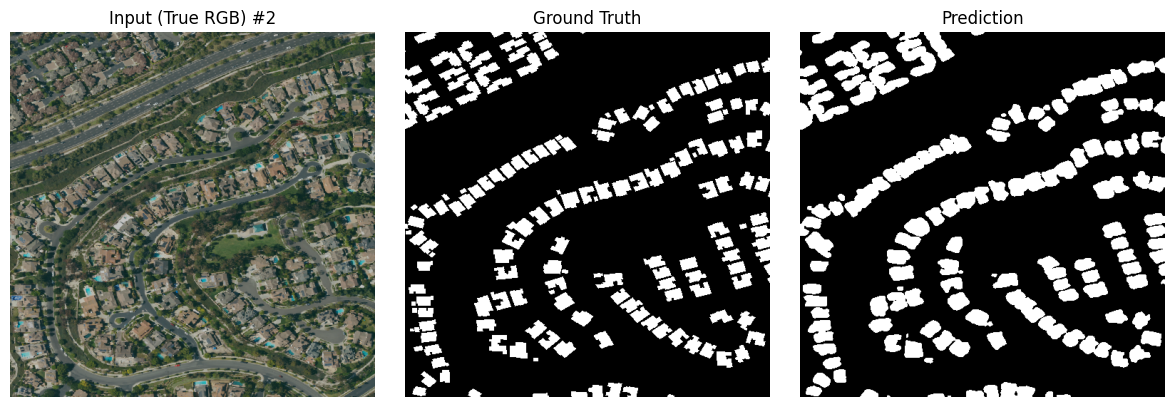
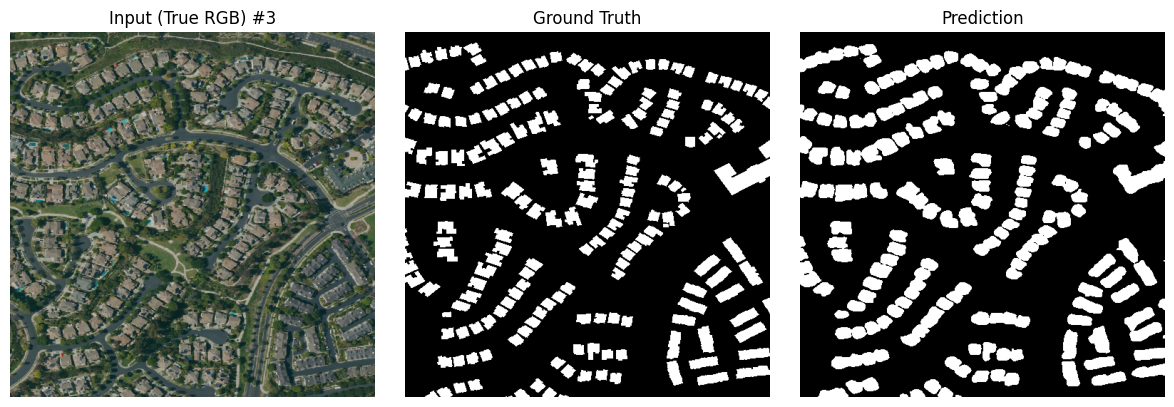
Sample 3
Sample 4
Vectorized Footprints
After cleaning and simplifying the predicted masks, we convert them to vector polygons and overlay on the original imagery:

References
- NAIP imagery: https://www.fsa.usda.gov/programs-and-services/aerial-photography/imagery-programs/naip-imagery
- OpenStreetMap building footprints: https://download.geofabrik.de/
- Segmentation Models PyTorch: https://github.com/qubvel/segmentation_models.pytorch